研究人員設計軍事機器人 可自行決定用輪子還是腿越過障礙物
2020-11-05 10:12:05 cnBeta.COM該項目是該大學工程技術和工業分布系的DARPA進攻性群居戰術(OFFSET)項目的一部分。下面的機器人概念圖作為OFFSET第三次現場實驗的一部分進行了展示。副教授Kiju Lee還宣布,她獲得了一份新的DARPA合同,用于Offset Sprint-5的工作,重點是增強物理機器人試驗臺。
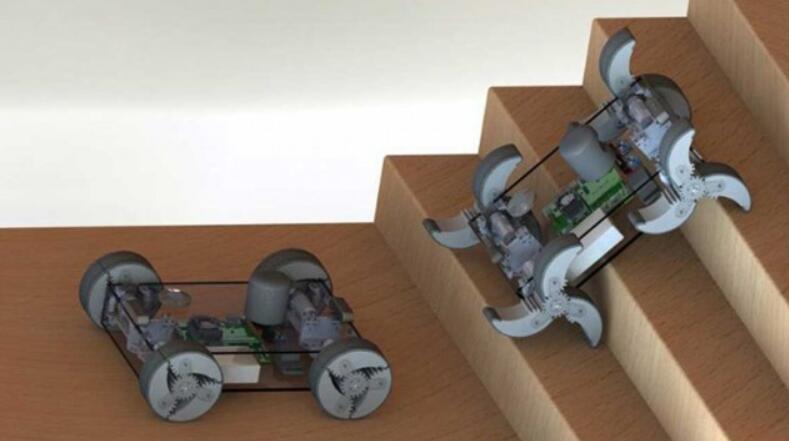
該計劃的重點是為城市軍事行動開發具有敏捷和多功能機車能力的無人地面車輛。Lee和她的團隊正在開發一種被稱為a-WaLTR的適應性車輪和腿部可轉換機器人,能夠更有效地橫跨不同的服務,包括樓梯。該機器人可根據需要使用輪子或腿移動,并能自行決定使用哪種。
該團隊目前正在開發原型機,在暫定于2021年2月舉行的OFFSET FX5上展示該硬件平臺。該團隊還指出,雖然該技術是為軍事應用而創造的,但希望未來該技術還能有其他應用。Lee表示,這種適應性強的機器人可以應用于太空、家政服務、監控和農業等領域。
目前還沒有跡象表明,該機器人的功能原型已經構建完成。目前還不清楚DARPA授予的機器人制造合同價值多少。
免責聲明:本文由作者原創。文章內容系作者個人觀點,轉載目的在于傳遞更多信息,并不代表EETOP贊同其觀點和對其真實性負責。如涉及作品內容、版權和其它問題,請及時聯系我們,我們將在第一時間刪除!