“能說會跳”的微型機器人問世,以螞蟻為靈感,協作能力更強
2019-07-16 09:56:12 麻省理工科技評論螞蟻是“大力士”,能夠舉起超過自身重量數倍甚至數十倍的物體。但限于極小身型,螞蟻個體的能力著實有限。但在群體的合作下,一群螞蟻能夠有序地分工,建造復雜的巢穴、組織前進路線。簡單來說,就是通過交流和協作實現群體能力的最大化。
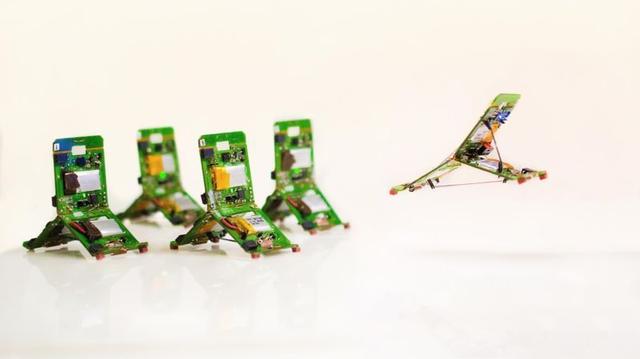
Tribots 機器人的能力和螞蟻很像。單個的 Tribots 能夠推動比自身更重的物體,跳上數倍于自身尺寸的高度;而當它們聚集成群時,不同的個體之間能夠進行交流、合作,共同完成同一個任務,甚至由一個機器人向多個其他個體下達指令,讓多個機器人完成協同任務。只不過,機器人之間的交流不需要通過觸角進行。
這一成果已經發表在了 Nature 上。
在外形上,Tribots 完全看不出有螞蟻的樣子,更像是一個行走的電路板,通過多張輕薄的材料折疊組裝而成,由于奇特的外形,它也被稱為是“三足機器人”。雖然機器人尺寸不超過 10 厘米,重量僅為 10 克,但巧妙的組合讓這個簡單的三足機器人具備了 5 種不同的運動形態:垂直跳躍、水平跳躍、翻過障礙物、在平臺及非平坦的平面上行進。
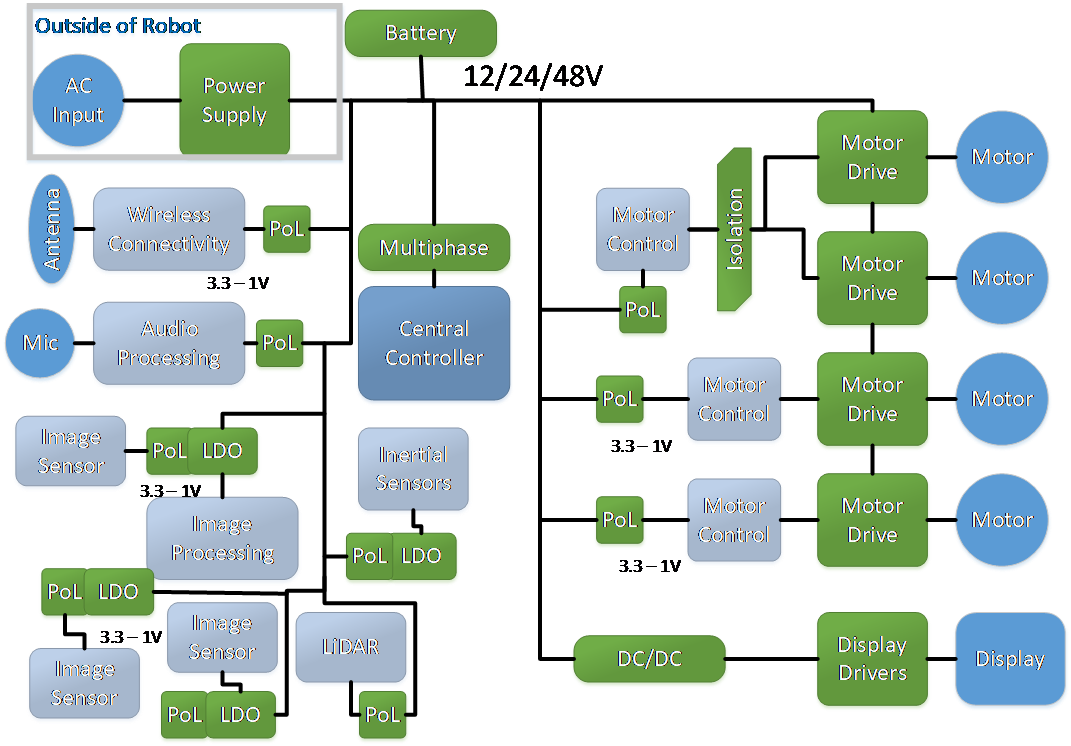
每個機器人都搭載了小型的紅外和距離傳感器(proximity sensor),用于感知和通信,這是機器人能獨立根據環境作出應對、進行個體間通信的硬件基礎。據 EPFL 介紹,該機器人還能根據不同的使用需求裝載更多不同的傳感器。
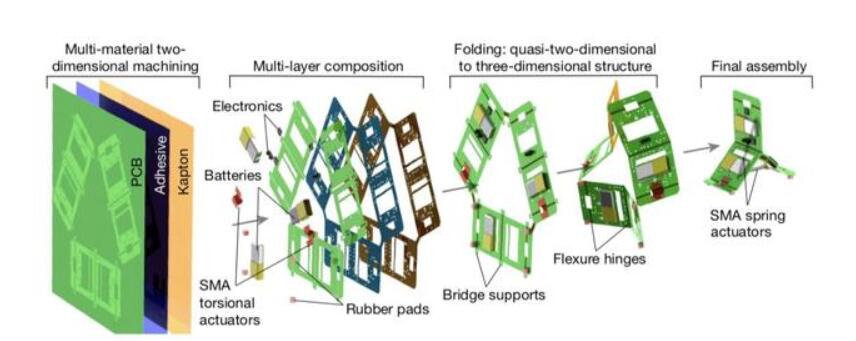
圖丨Tribot 由多種傳統的電子零部件折疊組裝而成。
每個機器人都攜帶了小型鋰電池,這些電池能夠獨立提供機器人行進、傳感、行進所需的所有能量,形成了自驅動能力。在動力方面,團隊選擇使用了形狀記憶合金,可以在特定溫度下發生形變,并隨著溫度復原而恢復形狀。
團隊在機器人機構上內置了微型加熱器,通過短時間的加熱控制形狀記憶合金的伸縮,讓其充當了機器人的肌肉。通過控制加熱器的工作即可分別控制每條腿的運動,以此讓機器人完成特定動作。
這些配置讓 Tribot 具備了多種運動方式,如前腳后腳相繼向前, 完成向前行走的動作;同時還能通過控制三條腿之間的配合,完成空翻動作,越過障礙物;在向上跳躍的測試中,Tribot 的彈跳高度能夠達到自身身高的 2.5 倍。
作者表示,開發這些動作都是受到了一種名為鋸針蟻(Odontomachus ants)的啟發,這種螞蟻的特點在于有一個特化的顎夾,能在 0.13 毫秒將顎夾張開到 180 度,這個動作可以快速敲擊地面,將自身迅速彈離。
從個體能力來說,小小的 Tribot 可以說是具備了螞蟻般的“神力”。
但更重要的還在后面:相同的結構,不同的角色分工,這也是螞蟻群的最大特點之一。
在 Tribot 身上,盡管每個機器人都有完全一致的結構、形態,而多樣的運動能力實現不同的分工,從而達到協作的目的,這都是建立在機器人個體和群體間的通信能力之上的。
在一個例子中,研究人員將兩個 Tribots 分別設定為領導者和跟隨者,當前者經過一個間隙后,通過傳輸信號向后者告知了前方地形的變化,讓后者能在沒有注意到間隙的情況下,根據信號的指示,跳過了間隙。
在另一個測試中,研究人員設置了單個機器人無法推動的重物,讓兩個 Tribots 合作將其推到特定位置。更有意思的是,兩者間配合是由另一個機器人進行指揮,像一個指揮手一樣指示兩個“工人”共同完成合作任務。
“每個 Tribot 都像螞蟻一樣,可以扮演不同的角色。當他們面對新的任務、未知的環境時,或是其他機器人迷路的時候,它們也可以馬上轉變成新角色。這超出了自然界中螞蟻的能力。”該研究的作者,EPFL可重構機器人實驗室主任 Jamie Paik 說道。
在未來的實際應用中,比如執行緊急搜索任務,Tribots 可以被大批量部署到現場。由于機器人數量眾多且具備通信能力,他們可以在很大的范圍內快速定位目標,而無需依賴 GPS。
“由于它們可以大量制造和部署,因此部分機器人的失效不會影響任務的成功,”Paik 補充道,“憑借其獨特的集體協作能力,我們的小型機器人可以更好適應未知的環境,因而在某些任務中比大型機器人有更強的能力。”
同時,作者也強調,可以將這個機器人看作是一個有趣的平臺,可以探索新的運動模式和為特定任務定制機器人的可能性。
免責聲明:本文由作者原創。文章內容系作者個人觀點,轉載目的在于傳遞更多信息,并不代表EETOP贊同其觀點和對其真實性負責。如涉及作品內容、版權和其它問題,請及時聯系我們,我們將在第一時間刪除!