無需鉗位電路實現(xiàn)動態(tài)導(dǎo)通電阻RDS(on)的測量技術(shù)
2025-09-10 19:09:59 EETOP動態(tài)導(dǎo)通電阻(RDS(on))是電源轉(zhuǎn)換器設(shè)計人員理解電荷俘獲效應(yīng)影響的重要參數(shù)。然而,關(guān)于其測量技術(shù)的知識體系仍相對較新。傳統(tǒng)的動態(tài)RDS(on)測量技術(shù)依賴于二極管鉗位電路,使示波器能夠以足夠的分辨率測量漏源電壓,而不會使示波器輸入過載。泰克為4、5和6系列MSO示波器推出的寬禁帶雙脈沖測試(WBG-DPT)測量軟件引入了一種新的軟件鉗位方法,采用獨特的雙探頭技術(shù),無需使用鉗位電路。
測量動態(tài)RDS(on)的挑戰(zhàn)
動態(tài)RDS(on)是指FET在開關(guān)過程中導(dǎo)通時,漏極與源極端子之間的平均電阻。漏源電阻RDS(on)是所有FET的重要參數(shù),因為它是傳導(dǎo)損耗和效率的一個關(guān)鍵因素。RDS(on)通過漏源電壓(VDS)與漏極電流(ID)的比值計算,并可表示為時間的函數(shù):
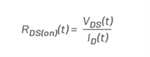
RDS(on)可以表示為開關(guān)周期導(dǎo)通部分該函數(shù)的平均值。動態(tài)RDS(on)由復(fù)雜半導(dǎo)體結(jié)構(gòu)中的電荷俘獲現(xiàn)象引起。研究GaN半導(dǎo)體的研究人員對動態(tài)RDS(on)特別感興趣。GaN可能會出現(xiàn)電流崩塌現(xiàn)象,其中動態(tài)RDS(on)會增加。當(dāng)器件在關(guān)斷狀態(tài)、漏源之間存在高電壓時,電子被俘獲在器件結(jié)構(gòu)中,就可能發(fā)生這種情況。而對于SiC器件來說這個問題要小一些,但設(shè)計人員也可能對測量動態(tài)RDS(on)感興趣。
要測量RDS(on),必須能夠準(zhǔn)確測量VDS(t)。測量RDS(on)的主要挑戰(zhàn)源于需要在高幅值開關(guān)信號中測量小的導(dǎo)通電壓。開關(guān)電壓VDS(t)的幅值根據(jù)應(yīng)用不同可達(dá)800V或更高。然而在導(dǎo)通狀態(tài)下,如圖2所示,VDS(t)會很低,約為10V或更小。此外,GaN和SiCFET可以以極高的轉(zhuǎn)換速率開/關(guān)。這些因素帶來了重大測量挑戰(zhàn):
? 在完整范圍內(nèi)捕獲VDS信號會導(dǎo)致VDS(on)的數(shù)字分辨率差。ADC量化誤差占信號的很大比例,導(dǎo)致大量量化噪聲。
? 簡單地增加示波器的垂直靈敏度會導(dǎo)致測量系統(tǒng)輸入放大器過載,除非進(jìn)行校正,否則會在過載恢復(fù)期間產(chǎn)生測量誤差。
? 高擺率會因寄生電感和電容引入畸變,這些需要時間才能穩(wěn)定。
由于開關(guān)電壓VDS可能很高且可能相對于地浮動,通常使用高壓差分探頭測量開關(guān)電壓。差分探頭有助于避免接地問題,從而提高RDS(on)測量的準(zhǔn)確性。功率電子實驗室中通常都會備有THDP系列差分探頭。因此,THDP系列探頭已針對此方法進(jìn)行了測試并推薦使用。
如前所述,如果使用低靈敏度(高V/div)捕獲整個VDS范圍,關(guān)斷狀態(tài)下的電壓僅代表示波器模數(shù)轉(zhuǎn)換器(ADC)和探頭放大器量程的一小部分,因此采集分辨率低。一種可能的方法是使用高靈敏度(低V/div)采集低導(dǎo)通電壓,以充分利用差分探頭和示波器量程。然而,使用高靈敏度采集高幅值信號會使差分探頭中的放大器過載,導(dǎo)致在短暫的過載恢復(fù)期間產(chǎn)生不準(zhǔn)確數(shù)據(jù)。
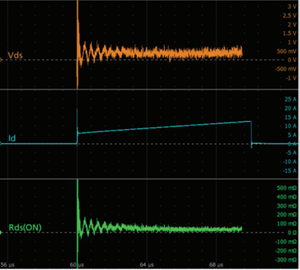
圖1. RDS(on)波形表征FET導(dǎo)通狀態(tài)下,漏源電壓(VDS)與漏極電流(ID)的動態(tài)比值關(guān)系。
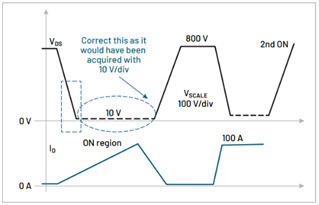
圖2. 高幅值的VDS與微小的導(dǎo)通態(tài)電壓使得RDS(on)的測量極具挑戰(zhàn)性。這一新方法通過校正實現(xiàn)了高靈敏度測量。
WBT-DPT測量自動化軟件中的新軟件鉗位技術(shù)使設(shè)計人員能夠使用手頭已有的設(shè)備快速測量動態(tài)RDS(on)。
基于示波器的新鉗位方法
Tektronix的軟件鉗位方法消除了對專用鉗位電路的需求。它依靠帶有兩個高壓差分探頭的示波器連接到FET上測量漏源電壓(VDS)。如圖3所示,使用兩個差分探頭測量VDS電壓,每個探頭設(shè)置為不同的靈敏度。
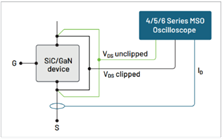
圖3. 采用雙高壓差分探頭測量VDS信號:一路探頭設(shè)置為高量程(如1500V)及高垂直刻度(如100V/格),另一路設(shè)置為低量程(如150V)及精細(xì)垂直刻度(如10V/格)。
? 一個差分探頭捕獲FET關(guān)斷時VDS從高到低的完整轉(zhuǎn)換。
? 另一個差分探頭僅以高靈敏度捕獲RDS(on)區(qū)域,在FET導(dǎo)通且VDS較小時提供高分辨率。這相當(dāng)于有意削剪VDS上的信號。注意這種方法類似于使用二極管鉗位電路削剪信號,但需要應(yīng)用校正以獲得良好結(jié)果。
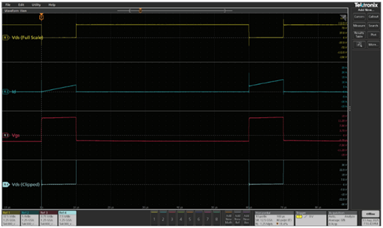
圖4. 采用THDP0200高壓差分探頭組對漏源電壓(VDS)進(jìn)行同步采集:其中一路探頭以標(biāo)準(zhǔn)垂直刻度獲取完整VDS波形數(shù)據(jù),另一路探頭通過更高靈敏度的垂直刻度設(shè)置獲取VDS細(xì)節(jié)數(shù)據(jù),該通道將觸發(fā)波形削波告警提示。
WBG-DPT軟件將全量程和高靈敏度(但過載)VDS波形組合,推導(dǎo)出導(dǎo)通狀態(tài)下漏源電壓的高分辨率復(fù)合波形。通常不建議過載差分探頭或示波器前端,因為在放大器從超出其正常規(guī)格的驅(qū)動中恢復(fù)時,測量質(zhì)量可能存疑。這被稱為"過載恢復(fù)時間",是放大器的常見規(guī)格。WBG-DPT應(yīng)用中的動態(tài)RDS(on)算法應(yīng)用多種技術(shù)來減輕以下影響:
? 低靈敏度(高V/div)下過度的ADC量化噪聲
? 隨機噪聲
? 探頭穩(wěn)定時間、探頭誤差和畸變
? 削波波形上的過載恢復(fù)
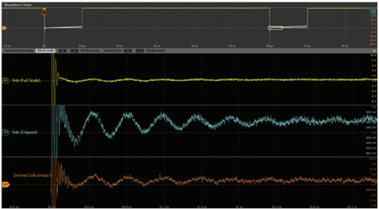
圖5. 通過信號處理算法融合削波參考波形(R4)與全量程波形(R1),生成經(jīng)校正的VDS(on)派生波形(M1)――該波形在保留削波波形高分辨率特性的同時,利用全量程VDS數(shù)據(jù)完成幅值修正。
量化誤差、穩(wěn)定時間和過載恢復(fù)的影響如圖5所示,過載/削剪的R4顯示延長的振鈴和達(dá)到實際電壓值的恢復(fù)時間。未削剪的R1捕獲了覆蓋總線電壓的完整VDS電壓信號,但存在明顯的量化問題。
使用信號調(diào)理推導(dǎo)低噪聲VDS(on)
在典型的雙脈沖測試(DPT)中,開關(guān)器件在第一個脈沖期間初始導(dǎo)通,允許通過負(fù)載電感的電流線性增加,直到達(dá)到所需的測試水平。然后器件關(guān)斷,隨后用第二個脈沖重新激活,以評估其在指定測試電流下的開關(guān)性能。RDS(on)在第二個脈沖期間測量。
VDS(on)的信號調(diào)理算法假設(shè)滿足以下條件:
? 以突發(fā)方式執(zhí)行兩個導(dǎo)通周期,如雙脈沖測試。使用第一個脈沖的信息增強第二個脈沖。第一和第二脈沖之間需要50μs間隙,使任何穩(wěn)定誤差對兩個脈沖相同。探頭和示波器通常具有約10μs的時間常數(shù),因此50μs的穩(wěn)定時間通常足夠。
? 第一和第二脈沖寬度應(yīng)至少為10μs,使算法可以忽略初始紋波,專注于實際的RDS(on)。
? 突發(fā)之間有足夠的延遲,使DUT在多次雙脈沖測試之間保持穩(wěn)定。
? VDS削波波形的垂直刻度足夠靈敏以提供足夠分辨率,但也不至于過度靈敏導(dǎo)致信號代表性不足。
WBG-DPT應(yīng)用的PRESET功能根據(jù)指定的VDS開關(guān)電壓自動設(shè)置刻度。以下是動態(tài)RDS(on)測量算法中的高級步驟。
1. 多組雙脈沖測試的波形平均處理
為降低隨機噪聲對測量的影響,可執(zhí)行多次雙脈沖測試并對結(jié)果波形進(jìn)行平均處理。WBG-DPT的RDS(on)測量功能支持此操作,默認(rèn)每組測量進(jìn)行8次波形平均。
2. 全量程與削波VDS(on)信號段的融合
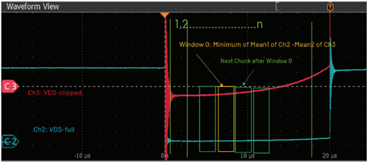
圖6. 全量程波形(通道2)與削波波形(通道3)的融合處理
通過算法整合全量程VDS(on)段(高動態(tài)范圍)與削波VDS(on)段(高分辨率),生成精確的導(dǎo)通電阻特性曲線。此校正通過使用未削剪的全量程信號生成低頻偏移校正,保持削波樣本中的高分辨率信息。結(jié)果是具有導(dǎo)通時間內(nèi)增強垂直分辨率的復(fù)合VDS波形。導(dǎo)出的VDS表示導(dǎo)通區(qū)域,就好像時域波形是以較低垂直刻度采集的。
3. 從導(dǎo)通2中減去導(dǎo)通1以消除穩(wěn)定誤差
在復(fù)合VDS波形中,VDS(off)和VDS(on)之間兩個電壓階躍的任何穩(wěn)定誤差在兩個脈沖的第一和第二脈沖中應(yīng)幾乎相同,因為兩個脈沖的階躍步進(jìn)大致相同。這假定兩次導(dǎo)通之間的時間足夠長以使得測量系統(tǒng)在周期之間穩(wěn)定。
因此,為了從導(dǎo)出的VDS中消除一致的穩(wěn)定誤差,從第二VDS(on)段的樣本中減去第一VDS(on)段的樣本。這既消除了穩(wěn)定誤差,也消除了兩個脈沖共有的任何VDS(on)。第二脈沖中剩余的電壓將是由于第二脈沖中流經(jīng)RDS(on)的較高電流。從第二周期的Id中減去第一導(dǎo)通周期的Id,以得到流經(jīng)RDS(on)的增量電流。
一旦知道來自第二關(guān)斷周期的增量電壓和電流,就使用歐姆定律計算RDS(on)的樣本。這些樣本被顯示出來,并可用于確定測量值,如周期內(nèi)的平均RDS(on)。注意由于上述信號處理,僅與第二關(guān)斷周期相關(guān)的RDS(on)才是有效的并顯示出來。
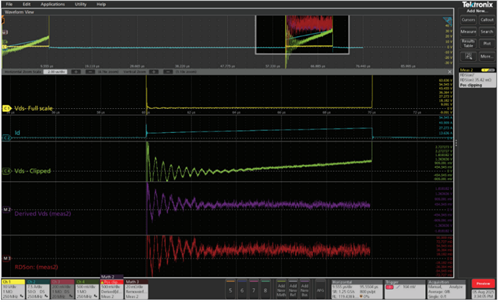
圖7. 配置WBG-DPT雙脈沖測試分析功能的5系列B MSO示波器正在進(jìn)行動態(tài)RDS(on)測量
使用軟件鉗位技術(shù)執(zhí)行動態(tài)RDS(on)測量
與任何動態(tài)RDS(on)測量方法一樣,使用此新技術(shù)時必須謹(jǐn)慎操作。如上文所述,建議采用10μs的脈沖寬度和50μs的脈沖間隔。削波波形在垂直刻度上存在限制。該算法已通過泰克THDP系列高壓差分探頭的測試,但尚未使用其他探頭進(jìn)行驗證。此方法不適用于測量低于10mΩ的動態(tài)RDS(on)。
執(zhí)行動態(tài)RDS(on)測量的測試設(shè)置如圖8和圖9所示。系統(tǒng)包括:
? 4、5或6系列B MSO示波器
? WBG-DPT雙脈沖測試軟件許可證
? THDP0100或THDP0200:各2個用于測量削波VDS和全量程VDS信號
? AFG31000系列函數(shù)發(fā)生器
? TRCP、TCP0030A或TCP0150或帶TICP電流探頭的CVR用于測量ID
? 用于低側(cè)VGS的TPP1000
? 電源供應(yīng)VDD
? 作為DUT的SiC或GaN測試板
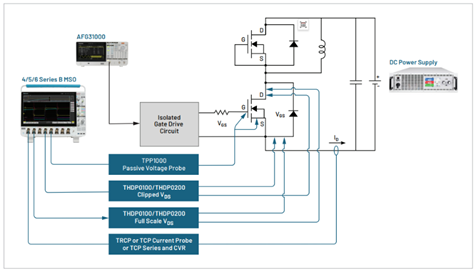
圖8. 低邊FET動態(tài)RDS(on)測量測試配置示意圖。需注意:兩個高壓差分探頭分別連接在FET的漏極和源極端子。
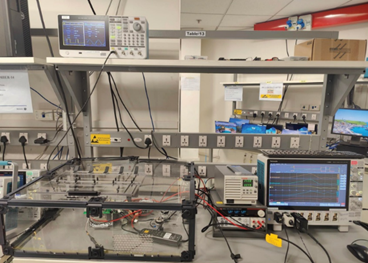
圖9. 實驗室動態(tài)RDS(on)測試配置實景圖

EETOP 官方微信

創(chuàng)芯大講堂 在線教育

半導(dǎo)體創(chuàng)芯網(wǎng) 快訊
相關(guān)文章