自動(dòng)駕駛汽車就真的準(zhǔn)確嗎?新研究指出它們可以被愚弄
2022-03-16 08:14:51 cnBeta.COM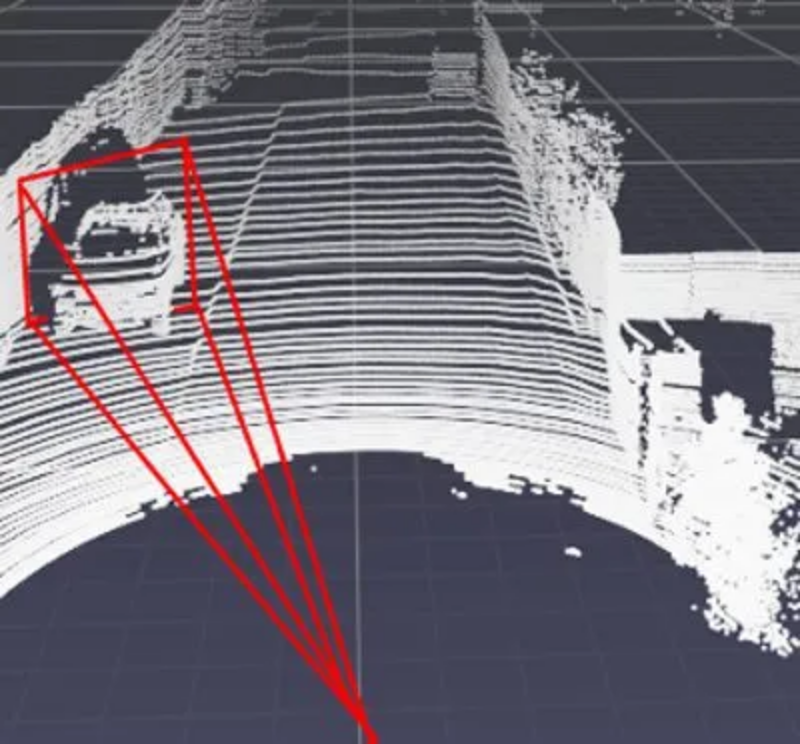
這可能意味著問題和重大損失,尤其是當(dāng)用于軍事場合時(shí),一輛車就會(huì)變成一個(gè)有價(jià)值的目標(biāo)。更有甚者,研究人員強(qiáng)調(diào),黑客有可能找到一種同時(shí)攻擊不同車輛的方法。
杜克大學(xué)電氣和計(jì)算機(jī)工程系迪金森家族副教授Miroslav Pajic說道:“我們的目標(biāo)是了解現(xiàn)有系統(tǒng)的局限性以便我們能夠保護(hù)自己免受攻擊。這項(xiàng)研究表明,在3D點(diǎn)云中僅僅增加幾個(gè)數(shù)據(jù)點(diǎn)--在一個(gè)物體實(shí)際所在的前方或后方--就可以混淆這些系統(tǒng),進(jìn)而使其做出危險(xiǎn)的決定。”
研究人員指出,當(dāng)用激光槍射擊激光雷達(dá)傳感器時(shí),系統(tǒng)的缺陷將會(huì)開始出現(xiàn)。它將扭曲因增加虛假數(shù)據(jù)點(diǎn)而造成的汽車感知。根據(jù)Pajic的說法,如果數(shù)據(jù)點(diǎn)跟汽車攝像頭看到的有很大差異,系統(tǒng)就能發(fā)現(xiàn)這種攻擊。然而根據(jù)杜克大學(xué)的研究,當(dāng)3D激光雷達(dá)數(shù)據(jù)點(diǎn)被精確地放置在攝像頭2D視場的某個(gè)區(qū)域內(nèi)時(shí)系統(tǒng)就會(huì)被騙到。
這就形成了一個(gè)容易受到攻擊的區(qū)域。它的形狀是在攝像機(jī)鏡頭前延伸出一個(gè)截錐或是被切掉一個(gè)尖端的3D金字塔的形式。
Pajic說道:“這種所謂的截錐攻擊可以欺騙自適應(yīng)巡航控制,進(jìn)而使其認(rèn)為車輛正在減速或加速。而當(dāng)系統(tǒng)能夠發(fā)現(xiàn)有問題的時(shí)候,如果不采取積極的機(jī)動(dòng)措施就沒有辦法避免撞上汽車,而這可能會(huì)造成更大的問題。”
幸運(yùn)的是,Pajic和他的團(tuán)隊(duì)有一個(gè)可行的解決方案,那就是通過增加冗余度如視場重疊的立體攝像機(jī)來解決這一風(fēng)險(xiǎn)。據(jù)他們介紹稱,這些技術(shù)將協(xié)作運(yùn)轉(zhuǎn)以正確計(jì)算出距離并確定激光雷達(dá)數(shù)據(jù)和攝像機(jī)感知之間的誤差。
“立體相機(jī)更有可能成為可靠的一致性檢查,盡管對于如何確定激光雷達(dá)/立體相機(jī)數(shù)據(jù)是否一致或發(fā)現(xiàn)它們不一致時(shí)該如何處理還沒有軟件得到充分驗(yàn)證,”該研究的論文第一作者、Pajic網(wǎng)絡(luò)物理系統(tǒng)實(shí)驗(yàn)室的博士生Spencer Hallyburton說道,“而且,要完美地保證整個(gè)車輛的安全,需要在其整個(gè)車身周圍安裝多套立體攝像機(jī)以提供100%的覆蓋。”
Pajic還介紹了創(chuàng)建一個(gè)系統(tǒng)的方法--讓相互靠近的汽車共享數(shù)據(jù)。這項(xiàng)研究和該團(tuán)隊(duì)的建議將于8月10日至12日在2022年USENIX安全研討會(huì)上公布。
免責(zé)聲明:本文由作者原創(chuàng)。文章內(nèi)容系作者個(gè)人觀點(diǎn),轉(zhuǎn)載目的在于傳遞更多信息,并不代表EETOP贊同其觀點(diǎn)和對其真實(shí)性負(fù)責(zé)。如涉及作品內(nèi)容、版權(quán)和其它問題,請及時(shí)聯(lián)系我們,我們將在第一時(shí)間刪除!
關(guān)鍵詞: 自動(dòng)駕駛 人工智能 雷達(dá)

EETOP 官方微信

創(chuàng)芯大講堂 在線教育

半導(dǎo)體創(chuàng)芯網(wǎng) 快訊
相關(guān)文章



















