采用DC-DC模塊的無人機(UAV)電源解決方案
2015-12-10 12:13:42 n采用DC-DC模塊的無人機(UAV)電源解決方案
摘要:
在設計針對無人機(UAV)的電源系統時,設計人員所關心的參數是尺寸(S)、重量(W)、功率密度(P)、功率重量比、效率、熱管理、靈活性和復雜性。
體積小、重量輕、功率密度高(SWaP)可以讓無人機攜帶更多的有效載荷,飛行和續航時間更長,并完成更多的任務。
更高的效率可以盡可能利用能源效率,最大限度地提高續航時間和飛行時間,也使熱管理盡可能容易,因為即使是更少的功率損耗都會傳遞熱量。
高度靈活性和低復雜性可以使電源系統設計更加容易,并讓無人機設計人員專注于無人機設計的其他部分,而不是花太多時間在電源系統設計;它縮短了設計時間,并使設計變得不那么復雜。
為了利用以上提到的優勢,Vicor模塊電源解決方案可以用最全面產品組合的高效率、高密度、配電架構,為性能關鍵的無人機應用提供完整的電源解決方案。
無人機的種類:
無人機可以從遠程位置進行控制,或基于預先配置來自動運行。無人機有許多應用,從取保候審(recognizance)到消防,都可以由不同類別的無人機實現。
|
|
無人機的種類 |
||
|
近距離無人機 |
短程無人機 |
耐力型無人機 |
|
|
范圍 |
50公里 |
200公里 |
> 200公里 |
|
耐力 |
30分鐘至2小時 |
8至10小時 |
> 24小時 |
|
重量 |
2-10磅 |
< 10,000磅 |
< 229,000磅 |
|
速度 |
- |
< 300 mph |
< 454 mph |
|
海拔高度 |
< 1000英尺 |
< 50,000英尺 |
< 65,000英尺 |
|
有效載荷 |
- |
< 3,800磅 |
< 1,900磅 |
無人機的電源:
根據子系統的負載要求,無人機有幾種可供選擇的電源。
鋰離子電池是一種常用的電源,由于體積小和成本較低,是100瓦和運行數天的無人機的理想選擇。
為了有更高的能量密度和功率密度,還可以選擇其他替代電源,包括太陽能電池系統、燃氣輪機、柴油發電機等。
無人機的典型電源鏈:
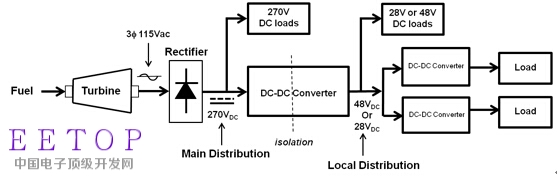
圖1(UAV電源鏈)
在典型無人機電源鏈中,有一個基于渦輪的發電機提供3相ac電源,通過整流器轉換為270V dc,然后通過隔離式DC-DC轉換器轉換為48V dc或28V dc。
系統和數據鏈路,其中每一個都需要一個3.3V、5V和12V等的電壓范圍。因此,下游DC-DC轉換器或niPoL(非隔離式負載點)需要為負載提供28V或48V dc母線所需的電壓。
為了實現高效率,高電壓DC母線(270V、48V或28V)沿著無人機的電源鏈進行優先配電。由配電引起的功率損耗基于I2R(R為線電阻),由于較高的電壓可以最大限度地降低損耗,從而降低了電流;尤其是大型無人機,還有很長的配電長度。
在安全方面,在高電壓DC母線(關鍵詞: