關(guān)于藍牙6.0通道探測測距,在一年前,就已經(jīng)在討論了。如今,藍牙技術(shù)聯(lián)盟(Bluetooth SIG)剛剛批準了這項新標準,正是時候提醒大家這項新功能能夠帶來什么。藍牙核心規(guī)范6.0版中引入的通道探測技術(shù),能顯著提高基于藍牙的距離測量精度,將誤差從大約3-5米縮小到約30-50厘米。通道探測為無鑰匙進入、查找我的設(shè)備及其他應(yīng)用提供了全新、更高效且更安全的選項。
藍牙無處不在,并且已經(jīng)通過接收信號強度指示(RSSI)提供了測距支持。這是否意味著我們不需要新標準和新設(shè)備?難道我們不能繼續(xù)使用現(xiàn)有的技術(shù)嗎?RSSI非常簡單,只需測量發(fā)射器信號強度的衰減即可。然而,衰減不僅取決于距離,還受到障礙物和衍射的影響。雖然多個信標可以幫助提高零售或醫(yī)院等場景下的精度,但對于無鑰匙汽車進入等個人應(yīng)用來說,這樣的解決方案顯然并不奏效。藍牙5.1中引入的到達角(AoA)和離開角(AoD)測量技術(shù),可以通過三角法細化來提高精度,但這需要在接收器或發(fā)射器上安裝多個天線。而且,這些方法同樣會受到接收器與發(fā)射器之間路徑周圍表面反射引起的多徑傳播的影響。相比之下,藍牙6.0的通道探測技術(shù)則采用基于相位的測距方法。一個設(shè)備向另一個設(shè)備發(fā)送正弦波,后者再將相同的信號發(fā)送回原始設(shè)備。初始信號與接收信號之間的相位差提供了相當精確的距離測量。更好的是,障礙物反射的信號會比直接返回的信號傳播路徑更長,表現(xiàn)出更大的相位偏移,從而在距離估計中易于忽略。
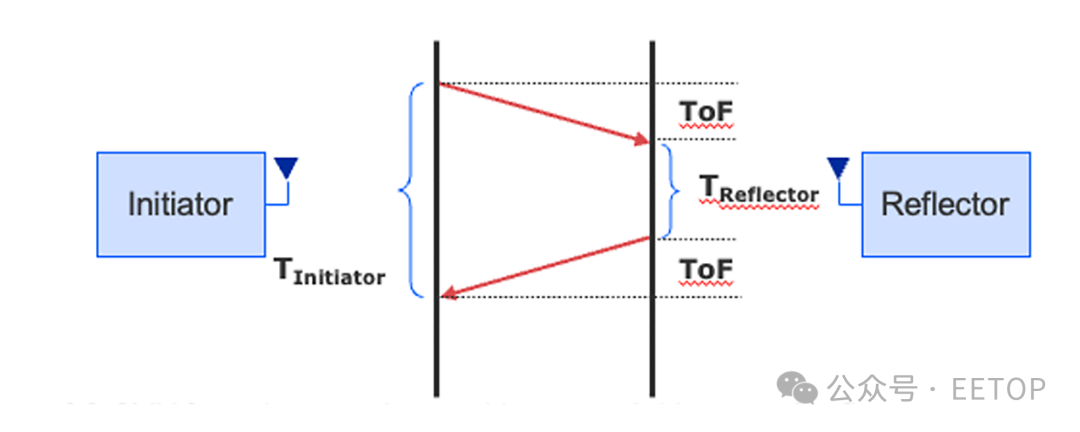
在發(fā)起方和反射器之間交換的 CS SYNC 數(shù)據(jù)包
另一方面,超寬帶(UWB)技術(shù)非常準確,能夠提供厘米級甚至更高的定位精度。但權(quán)衡之下,UWB需要額外的特定媒體訪問控制(MAC)、調(diào)制解調(diào)器和無線電(可以是集成或單獨的芯片組),這增加了設(shè)備的材料成本(鑒于設(shè)備出于其他原因也需要支持藍牙)。而且,UWB比藍牙更耗電,除非在絕對必要時使用,否則會更快地耗盡電池。一種想法可能是將RSSI方法用于大致測距,而將UWB用于近距離的精確測距。但這里存在兩個問題。首先,較早版本的藍牙易受中繼攻擊。在原始的測距嘗試中,攻擊者可以攔截藍牙通信并將其中繼到另一個設(shè)備,如果未使用UWB增加安全性,則可能允許他們打開你的車門。第二個問題是在某些條件下的功耗問題。假設(shè)你的車停在前門附近,而你的車鑰匙就在門內(nèi)的桌子上,處于車的可接收范圍內(nèi)。不難想象,你的鑰匙扣會不斷嘗試與汽車通信,觸發(fā)UWB測距會話,從而迅速耗盡鑰匙扣的電池。許多人認為,實際應(yīng)用必須依賴于多種方法的結(jié)合。推動UWB發(fā)展的FiRa聯(lián)盟以及汽車連接聯(lián)盟(CCC)都支持這一方向。一個建議是,在大約30米范圍內(nèi)使用RSSI進行初步粗略估計。然后,當你靠近時,它會切換到信道探測。在此階段,它可以交換憑證以首次建立安全連接,并在駕駛者接近汽車時進一步細化RSSI估計。在更近的范圍內(nèi),UWB可以進一步精確估算。這些方法之間的切換當然應(yīng)該對用戶透明,并且應(yīng)該進行調(diào)整以避免在不需要時不必要地開啟UWB。優(yōu)化這些選擇是產(chǎn)品制造商可以與提供所有三個選項的供應(yīng)商合作以實現(xiàn)差異化的領(lǐng)域。