Imec 發(fā)布脈沖神經(jīng)網(wǎng)絡(luò)的芯片,用于無人機(jī)防撞控制
2020-05-03 09:54:04 EETOP編譯Imec宣布了一種新的芯片,該芯片使用了脈沖神經(jīng)網(wǎng)絡(luò)技術(shù)(SNN),Imec聲稱該芯片模仿了“生物神經(jīng)元群的運作方式來識別時間模式。其功耗僅為其他芯片的一百分之一,而延遲則僅為其他芯片的十分之一。Imec的芯片被稱為同類產(chǎn)品中的第一個,是基于SNN的新型芯片,專門處理雷達(dá)信號(特別是用于無人機(jī)防撞)。
通常,人工神經(jīng)網(wǎng)絡(luò)(ANN)用于基于雷達(dá)的汽車防撞系統(tǒng)中。但是,人工神經(jīng)網(wǎng)絡(luò)是功耗很大,也無法緩解延遲問題。這種延遲是由傳輸?shù)?a href="http://www.xebio.com.cn/ai" target="_blank" class="keylink">AI推理算法進(jìn)行分析和決策的數(shù)據(jù)信號引起的。
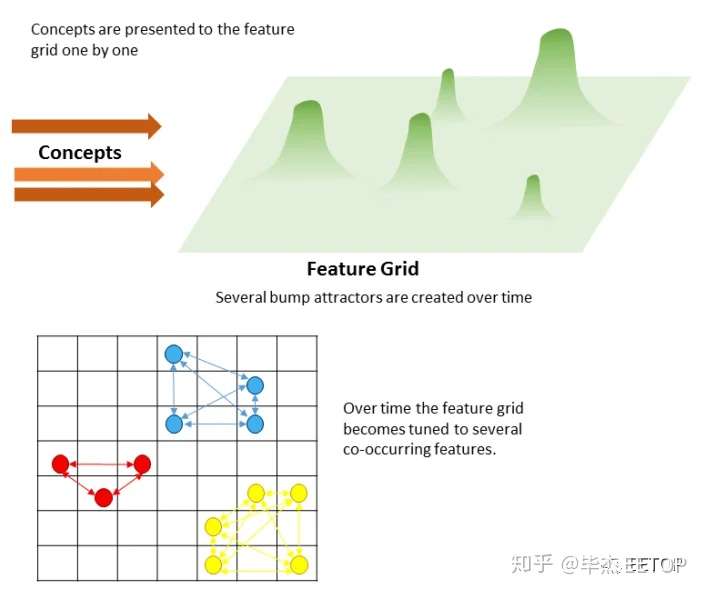
正如Imec的Ilja Ocket所描述的那樣,“ SNN的運行與生物神經(jīng)網(wǎng)絡(luò)非常相似,在該過程中,神經(jīng)元會隨時間稀疏地發(fā)射電脈沖,并且僅在感覺輸入發(fā)生變化時運作。這樣,可以顯著降低能耗。” 因此,只有當(dāng)活動出現(xiàn)時,即當(dāng)需要處理和分析一些東西時,才會出現(xiàn)電流 "脈沖"。否則,只需要最小的功率就可以了。
至于延遲,很多 "思考 "都是在現(xiàn)場進(jìn)行的。正如AAC貢獻(xiàn)者Chantelle Duboise所描述的那樣,脈沖神經(jīng)網(wǎng)絡(luò)(SNN)傳感器元件直接與其他傳感器元件進(jìn)行通信。反過來,這些傳感器元件會根據(jù)自己的激勵水平做出部分反應(yīng)。因此,很多處理過程都是在傳感器內(nèi)部進(jìn)行的。耗時的人工智能引擎過程被降到最低,從而減少了延遲。
此外,Imec聲稱,所謂的芯片“脈沖神經(jīng)元”能夠以一種能夠消化信息、學(xué)習(xí)時間模式并記憶這些信息的方式進(jìn)行交互。因此,Imec的設(shè)計將芯片的行為轉(zhuǎn)化為通過仿真精確預(yù)測的反應(yīng)。
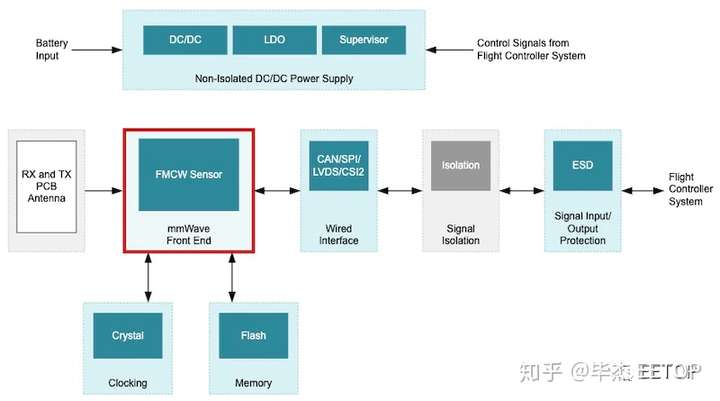
無人機(jī)通常獨立于人類控制,或者至少半獨立于人類控制。為了避免沖撞,他們必須在幾毫秒內(nèi)做出有關(guān)速度和方向的決策,因此延遲越短越好。 無人機(jī)通常使用機(jī)載雷達(dá)系統(tǒng)來收集飛機(jī)繪制安全飛行路線所需的原始信息。SNN芯片能夠在物理雷達(dá)附近完成大部分信息處理,這使得響應(yīng)時間大大縮短,決策也更加準(zhǔn)確。
此外,小型無人機(jī)需要與大型設(shè)備相同的“腦力”,但可用來“養(yǎng)活”大腦的機(jī)載功率受到極大限制。這些因素使無人機(jī)成為新SNN芯片的合適用例。根據(jù)Ocket的說法,“目前,我們正在探索一種自動駕駛無人機(jī),該無人機(jī)依靠其機(jī)載攝像頭和雷達(dá)傳感器系統(tǒng)進(jìn)行倉庫內(nèi)導(dǎo)航,在執(zhí)行復(fù)雜任務(wù)時與墻壁和架子保持安全距離。”
在瞄準(zhǔn)雷達(dá)應(yīng)用之前,該設(shè)備的最初目標(biāo)是功耗受限應(yīng)用中的語音處理和心電圖(ECG)處理。該芯片的通用架構(gòu)允許它被重新配置為雷達(dá)、聲納和激光雷達(dá)。
以無人機(jī)為例,如果轉(zhuǎn)向或改變速度的決定是在距離雷達(dá)或激光雷達(dá)設(shè)備更近的地方做出的,那么該設(shè)備可以減少延遲并節(jié)省時間。因此,Imec預(yù)計,這種新設(shè)備將成為自動駕駛汽車和合作機(jī)器人的有用補充,因為在自動駕駛汽車和合作機(jī)器人中,為了安全,必須做出快速、可靠的決定。
關(guān)鍵詞: 脈沖神經(jīng)網(wǎng)絡(luò) SNN

EETOP 官方微信

創(chuàng)芯大講堂 在線教育

半導(dǎo)體創(chuàng)芯網(wǎng) 快訊
相關(guān)文章



















