機器人的“大腦”:機器人控制技術的重要性
2015-11-01 08:47:36 奧創智能網機器人學代表了當今集成度高、具有代表性的高技術領域,它綜合了多門學科。其中包括機械工程學、計算機技術、控制工程學、電子學、生物學等多學科的交叉與融合,體現了當今實用科學技術的先進水平。
一般而言,機器人由幾大部分組成,分別為機械部分(一般是指通過各關節相連組成的機械臂)、傳感部分(包括測量位置、速度等的測量裝置),以及控制部分(對傳感部分傳來的測量信號進行處理并給出相應控制作用)。

作為機器人的“大腦”,機器人控制技術的重要性不言而喻
它主要是通過傳感等部分傳送的信息,采用控制算法,使得機械部分完成目標操作而承擔相應控制功能對應的部分。最終的目的是盡可能減小機器人實際運動軌跡與期望目標的偏差,達到理想的運動精度。
機器人控制器是一個計算機控制系統,它以機器人控制技術為理論,同時還要配合機器人的運動學和動力學建模。這時,我們就將一個復雜、抽象的物理模型 轉換成了相對清晰、具象的數學模型,一經建立,那么我們就在一定程度上就把控制問題從具體的機器人裝置中分離出來,從而對其進行進一步地認識。
隨著機器人相關科學技術的演進,控制算法也逐漸變得豐富起來,產生了諸如自適應控制、自校正控制、魯棒控制、變結構控制、非線性系統控制、預測控制等眾多新型控制策略。
但是,在眾多優秀的控制算法中,最為活躍的當屬PID(比例、積分、微分)控制,許多先進的控制策略也都是基于PID控制算法的基礎上發展出來的。
在生產過程系統控制的發展歷程中,PID 控制是歷史最悠久生命力最強的基本控制方式之一。在20 世紀40 年代以前除在最簡單的情況下可以采用開關控制外,它是唯一的控制方式。
20世紀,通信技術、電子技術開始發展。同時戰爭、工業也成為了推動力,自動控制技術與自動控制理論開始快速發展。PID的誕生源于人類對于反饋系統的相關研究。
20世紀20年代,美國貝爾電話實驗室的科學家本逐步建立了反饋控制系統的頻率特性分析方法。貝爾實驗室具有通信背景的工程師們往往很熟悉頻域方法。

(美國貝爾電話實驗室外景)
1932年,奈奎斯特(H·Nyquist)發表論文,采用圖形的方法來判斷系統的穩定性。這套方法,后來也用于自動控制系統的分析與設計。之后,反饋控制原理開始應用于工業過程。
1934年美國麻省理工的赫曾教創立了伺服控制理論,首次提出軌跡跟蹤在反饋控制中的重要性。兩年后,英國的考倫德(A·Callender)和斯蒂文森(A·Stevenson)等人給出了 PID控制器的方法。
簡單說來,PID 控制的優點有三:
① 技術成熟,控制效果優良;
② 適應性強,對于各種過程控制對象,PID算法幾乎都符合要求;
③ 魯棒性強。
其中,魯棒性(Robustness)指,它反映反饋控制系統具有承受這一類不確定性影響的能力。簡單來說,當魯棒性較好就是指當機器人的某些物理特性產生變化時,PID算法仍能夠將機器人的姿態控制在合理范圍內。
一方面,PID成本低廉,易于操作;
另一方面,絕大部分控制對象可以直接使用PID控制,而不必深究其模型機理,因其較強的魯棒性可保證系統的性能指標滿足基本要求。
一般意義上,PID控制器是線性控制器。PID控制的含義是,將經過反饋后得到的誤差信號分別進行比例P、積分 I和微分D運算后再疊加得到控制器輸出信號。在實際工作過程中,系統給出給定值(也可稱為期望值),測量環節測量出的實際輸出值反饋給系統,且將與期望值 產生偏差e。而PID控制器的作用就是糾正該偏差e,下面就是PID的示意圖。

在具體應用時,我們可具體問題具體分析,根據實際需要選擇P、PI、PD、PID不同的組合方式。實際操作過程中,機器人的控制系統調試過程的關鍵便在于調節比例、積分、微分這三個環節的系數。
有了算法,該如何與機器人結合呢?

(輪式管道爬行機器人示意圖)
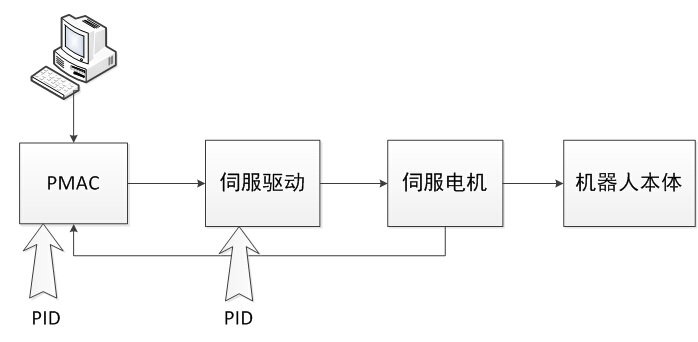
我們舉個例來說明。我們以輪式機器人為例,為了使得機器人可以敏捷、穩定地行走,我們需要對驅動機器人本體的伺服電機進行控制,那么首先需要對伺服 驅動器本身的PID進行調節。然后,為了控制效果更精確,系統還會采用開放式多軸運動控制器(PMAC),而該控制卡也可以進行PID調節,這種機器人的 控制系統可簡化成如下流程:
那么,這比例、積分、微分這三個環節在機器人系統中究竟起到怎樣的作用呢?
三個環節各有各的特色,讓我來分別看一下:
比例P:它可以反映機器人“當前”的行進速度與控制人員給定值之間的偏差,KP越大,系統調節的就越快,但是過大之后就會導致機器人運動不穩定;
積分I:它可以反映機器人的“累計”偏差,只要有誤差,積分環節就會調節,最后會調整使得系統無偏差,即使得機器人達到操作人員給出的運動狀態;
微分D:它可以“提前”預見機器人運動偏差的趨勢,在還沒有形成以前,超前地消除誤差;

(PMAC示意圖)
三個環節中,積分I環節和微分D環節不能單獨使用,必須結合比例P環節一起使用才行。
在該系統中,操控人員通過電腦與機器人進行人機交互,給出相應的控制指令(比如停止、前進等),伺服驅動的PID對伺服電機進行初步控制,伺服電機 的測量信號反饋給開放式多軸運動控制器,然后該控制器的PID會對系統進行再次細調,使伺服電機運行得更平穩,從而完成控制人員對輪式機器人的各種操作指 令。
自計算機進入控制領域以來,用數字計算機代替模擬計算機調節器組成控制系統。為了方便計算機計算,PID還可以采用增量式表達。對于機械部件來說, 這樣做大有裨益,計算機每次只輸出控制增量即可,這樣做便降低了機器人故障發生時的影響,并能實現無擾切換,同時PID控制也變得更加靈活了。